
电脑技术+AR/VR:微软果然人狠话不多,这款 Azure Kinect DK 太牛了
Azure Kinect DK 算是第三代Kinect设备了,但更主要的是用于开…


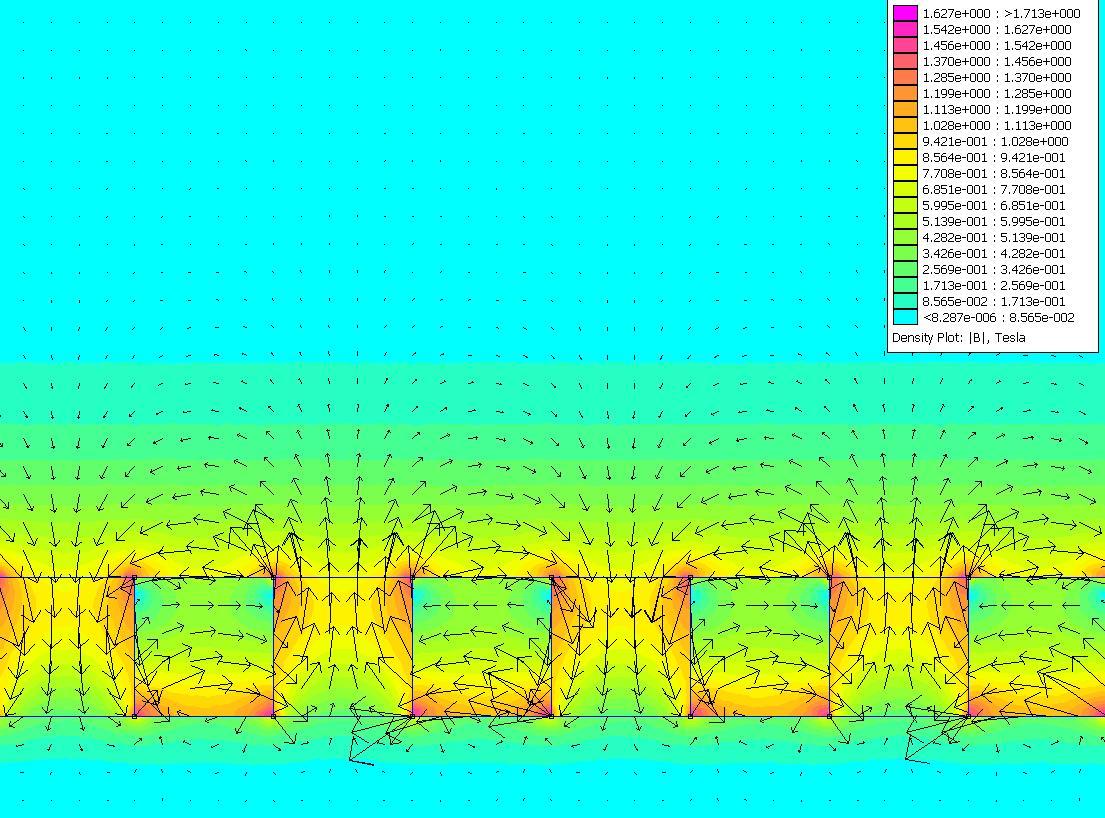
知乎上找到了一个系列文章——《Halbach array 的构建与模拟》,一共写了三篇,链接分别如下:
以下是全文转载。

本文全文转载自:如何编译属于自己的软路由OpenWrt固件 (hansendong.me)
从去年买了J1900软路由后一直使用其他人编译好的固件,没有想过自己编译,觉得这方面对自己很遥远。但最近新冠病毒疫情爆发一直在家,无聊看了很多视频教程感觉编译属于自己的软路由系统可以做到。说干就干,现在写这篇文章同时编译正在进行中。

关于如何编译 OpenWrt 固件,网上已有很多教程,我根据实操情况做适当的教程汇总,一是方便自已往后使用,二是提供想折腾编译 OpenWRT 的朋友一个思路。
关于为什么自已编译软路由固件?原因与以前的折腾Android精简手机ROM一样:追求极致的简洁与稳定。现在市面上很多网友提供的固件都是根据他们自身需求而做的编译,里面有很多插件对于我来说根本没什么用处,不好意思,强迫症又犯了。开始正题吧。
注意:
- 不要用 root 用户 git 和编译!!!安装好操作系统后先新建一个用户。
- 国内用户编译前最好准备好全局模式上网
- 默认登陆IP 192.168.1.1, 密码 password

来自于:HomeLede 2020.11.08 v5.4.72内核 UPnP NAS 多拨 网盘 DNS优化 帕斯沃 无缝集成 软件包 – 烛龙aurora – 博客园 (cnblogs.com)
固件说明
- 默认登陆IP 192.168.1.1, ,用户名root,密码 password
设计目标

Electromagnetic Levitation Quadcopter – YouTube(英文原版)
Obviously this “quadcopter” is a demonstration device, showing how moving magnets over a conducting surface can generate levitation. It has not been optimized to minimize losses or be an efficient mode of transport. I still think it’s pretty cool. I’m used to seeing light things levitated by induced currents but not a 100+ lb machine.
这个飞行方式承载能力很强。
中文字幕版:四旋軸電磁懸浮「直升機」 – Electromagnetic Levitation Quadcopter – YouTube
https://www.youtube.com/watch?v=Tuat0uwdz_A






