Posted inArduino
Arduino UNO R3 印刷电路图和元件单
内容来自Arduino.cc网站,截取出来方便大家参阅。 印刷电路板 电路图 电…
本文转载自:http://www.3lian.com/edu/2012/02-09/20876.html 有本博主略微修改,包括代码部分。
自从用上WordPress以来我不知道换了多少个后台编辑器了,从FCKEditor到CKeditor,甚至还有一些名不见经传的 CodeRenderUnmi和WLW、FE editor等等,用来用去发现有些功能确实强大,但是要想用着顺手就必须修改很多东西,而且一旦WordPress或者插件本身自己升级,那些修改过的 东西就必须重新再设置一遍,相当麻烦;要不就是一些离线的编辑器,复制来粘贴去的也很费心。到现在,我依然觉得,WordPress自带的编辑器才是最强 大且实用的!
正所谓“自此精修,渐进于无剑胜有剑之境”,抛开那些个浮夸的编辑器,回到WordPress自带的TinyMCE编辑器上来,要知 道,WordPress自身也在不断的强大,每一次升级对自带编辑器的改动都是很实用的,不仅将多媒体功能融合到了一起,而且给人的感觉是越来越干净利 落,从此我们也可以看到官方对自带编辑器TinyMCE的重视程度。下面我将我自己对自带编辑器TinyMCE的修改方法贴出来,所有代码只需写到主题里 的functions.php文件里,即使日后升级WordPress也不需要重复操作。
大家都知道,在后台新建文章后,编辑器就自动跳转到“可视化”视图,对于一些经常要插入代码或者WEB设计者们来说(我就是^_^),可能更习惯使 用HTML视图手动编辑。而且,像CKEditor在可视化视图下编辑本来没有<p>或<div>标签,但切换到HTML视图之 后就会自动添加,当然这是CKEditor的自动设置无可厚非,但是在日后想要重新编辑一篇发表过的文章时就会头疼了,因为CKEditor会自作多情的 生成很多冗杂或混乱的代码,保持代码的干净整洁非常不便(当然你要想凑合着用也不会对实际显示效果有很大改变,但会对网页结构减分)。
设置方法:将以下代码添加到主题的functions.php文件里即可:
[cc lan=”php”]add_filter(‘wp_default_editor’, create_function(”,’return “html”;’));[/cc]
新建文章后编辑器里的内容默认是空的,有些朋友做的是WordPress主题站、插件站或单纯的下载站,一些标准的格式化的文章每次都会输入“主题 名称”、“主题作者”、“下载地址”等内容,添加默认内容之后,这些重复性的工作以后再也不用了,一切都预定义好了。而且如果发表文章不需要这些预定义的 内容,只需要全选-Delete就ok了,并不会很麻烦。
设置方法:在主题functions.php文件添加以下代码即可:
[cc lan=”php”]
function insertFootNote($content) {
if(!is_feed() && !is_home()) {
$content.= “
“;
$content.= “WordPress网站优化之家
“;
$content.= “这里的预定义内容在编辑器可见WordPress网站优化之家
“;
$content.= “比如这里声明“版权所有”之类的话
“;
$content.= “
“;
}
return $content;
}
add_filter (‘the_content’, ‘insertFootNote’);
[/cc]
MariaMole是一个用于Arduino开发的开源高级IDE,拥有像项目管理,可调整的编译器选和语法高亮显示等特性。
网址:http://dalpix.com/mariamole
MariaMole is an alternative software for creating Arduino programns. Some of its features are:
Want to know more? Check the following pages:
上面提供了下载地址,文件总共1.57M,很小。
安装好后运行,弹出如下图界面,选择Arduino.exe的安装路径,比如我的是“D:\Program Files\Arduino\arduino-1.0.5\”,然后就可以使用了。里面附带一个简单的教程。

运行后的主界面:

60秒快速使用说明:
MariaMole quick start: Learn its basics in 60 seconds! Check this tutorial for your first steps on MariaMole: http://dalpix.com/mariamole-tutorial
1.来自第10套上机题

[cc lang=”c”]
#include
void fun(char *a)
{
int i=0;
char *p,*q;
p=q=a;
while(*p)
p++;
p–;
while(*p==’*’)
p–;
while(q<=p)
{
a[i]=*q;
i++;
q++;
}
a[i]='\0';
}
main()
{char s[81];void NONO ();
printf("Enter a string:\n");gets(s);
fun(s);
printf("The string after deleted:\n");puts(s);
NONO();
}
void NONO ()
{/* 本函数用于打开文件,输入数据,调用函数,输出数据,关闭文件。 */
FILE *in, *out ;
int i ; char s[81] ;
in = fopen("in.dat","r");
out = fopen("out.dat","w");
for(i = 0 ; i < 10 ; i++) {
fscanf(in, "%s", s);
fun(s);
fprintf(out, "%s\n", s) ;
}
fclose(in);
fclose(out);
}
[/cc]
今天下午和老婆打算去校外,途径大礼堂对面的草坪时被一阵声音吸引,一开始以为是房顶的维修学校广播的工作人员在钻孔,后来才注意到时六轴飞行器,看到时大概在距地面一百多米的距离,于是和老婆走近了一群操作人员进行观看。
这台六轴飞行器在进行航拍测试,地面人员有五六个,两人握有遥控器,一人手持7寸大小显示器,显示器带WiFi天线,显示内容正式六轴飞行器在高空中拍摄的实时画面。之前接触过这方面的资讯,自己也收藏了一些内容,今天见到了真机,它看起来不错。
我估计这些人是到这里测试航拍的附近的某公司人员。等六轴飞行器落地后拍了几张照片。其顶部写着 S800 EVO,查过之后知道这是大疆生产的S800 EVO六轴飞行器。
Arduino UNO 开发板是基于 ATmega328 的单片机。(点我查看官方说明)
那么我们能否直接使用 ATmega 来驱动 LED 灯闪烁呢?也就是直接做到 Blink 例子中的效果,即灯亮一秒、灭一秒。答案是可以的。
怎么做呢?
首先把 Arduino 与 PC 接好,然后把 Blink 程序下载到 Arduino 中,程序已经烧录进去。我们知道,该例子是让 Arduino 的 D13 号进行高低电平的切换,从而让接到该引脚的 LED 灯闪烁。
知道了这个,接下来我们把 ATmega328 芯片从 Arduino 上拿下,插在面包板上,一会要用。(记得插到中缝处跨过两边,这样才有针脚啊。)
那么下来该接线了,包括电源线和 LED 灯线。接到哪里呢?
我们先看看ATmega328的引脚标注:

上面的图来自于这个文件:AVR ATmega365p 技术手册,点我在线阅读。
我们查看这个文件(Arduino 官方给出的 Arduino UNO 板的电路图):http://arduino.cc/en/uploads/Main/Arduino_Uno_Rev3-schematic.pdf,在其中找到D13接到了 ATmega328 的哪个引脚上,同样的查看 GND 、电源部分的引脚。记下来。
观察后发现,D13 接到了 PB5 ,GND 是22号引脚。电源正极 VCC 为7号引脚,输入电压为5V,负极为8号引脚( GND 接地)。
看清楚后,我们就可以动手了。

简介选自百度百科:http://baike.baidu.com/view/1832202.htm
简单的说 Grasshopper 是一款在 Rhino 环境下运行的采用程序算法生成模型的插件。不同于 Rhino Scrip,Grasshopper不需要太多任何的程序语言的知识就可以通过一些简单的流程方法达到设计师所想要的模型。
个人认为,Grasshopper 其很大的价值在于它是以自己独特的方式完整记录起始模型(一个点或一个盒子)和最终模型的建模过程,从而达到通过简单改变起始模型或相关变量就能改变模型最终形态的效果。当方案逻辑与建模过程联系起来时,grasshopper可以通过参数的调整直接改变模型形态。这无疑是一款极具参数化设计的软件。
Grasshopper 中提供的矢量功能是 Rhino 中没有的概念,因此可能很多即便熟悉 Rhino 的用户在学习 Grasshopper 的时候也会对这部分有一些陌生,无论在 Grasshopper 中还是初中课本里,矢量就是矢量,他都代表同样的意思:既具有大小又具有方向的量。在 Rhino 中制作模型,比如画曲线,拉控制点,移动,阵列物体等等几乎所有的手工建模都是在反复的做定义距离和方向的工作。而在以程序建模(参数化建模)的软件中,这个工作我们希望是尽量以输入数据和程序自动计算的方式来完成,以替代传统的手工去画的方式,在 Grasshopper 或者其他的参数化建模的软件中用来完成这个工作的工具就是矢量。
Grasshopper目前主要应用在建筑设计领域,也是这两年中国大陆地区刚刚兴起,建筑表皮效果制作,复杂曲面造型建立,国内作品有中钢国际、银河soho等建筑设计。
Grasshopper软件教程:http://www.xuexiniu.com/s/Grasshopper/
关于 OpenWrt
OpenWrt 是嵌入式设备上运行的linux系统。OpenWrt 的文件系统是可写的,开发者无需在每一次修改后重新编译,令它更像一个小型的 Linux 电脑系统,也加快了开发速度。
你会发现无论是 ARM, PowerPC 或 MIPS 的处理器,都有很好的支持。并且附带3000左右的软件包,用户可以方便的自定义功能来制作固件。也可以方便的移植各类功能到openwrt下。
OpenWrt 可以被描述为一个嵌入式的 Linux 发行版,而不是试图建立一个单一的,静态的系统。OpenWrt 的包管理提供了一个完全可写的文件系统,从应用程序供应商提供的选择和配置,并允许您自定义的设备,以适应任何应用程序。
对于开发人员,OpenWrt 是使用框架来构建应用程序,而无需建立一个完整的固件来支持;对于用户来说,这意味着其拥有完全定制的能力,可以用全所未有的方式使用该设备。
百度百科介绍:http://baike.baidu.com/view/1671581.htm
OpenWrt 中文网:http://www.openwrt.org.cn/
今天有同学问我的 Arduino 在淘宝哪家店铺买的,他找的 Arduino 怎么要65元呢。于是想把自己购买的店铺贴出来。
买 Arduino 到重庆佳明达电子:http://jmddz.taobao.com/
买元器件和传感器到深圳育松电子:http://dzyj.taobao.com/
我买了以下元器件,没有全部都用到,不过用到的器件都很好用。给大家做个参考。
在重庆佳明达电子购买的东西:
从 Intel Galileo 的名字上看就知道这个版本的 Arduino使用了Intel 的 CPU,翻译过来就是“因特尔·伽利略”。
此处转载自DIGITIMES中文网,原文网址: Intel Galileo http://www.digitimes.com.tw/tw/dt/n/shwnws.asp?CnlID=10&Cat=25&Cat1=&id=352872#ixzz2ieAIhCUi
Intel Galileo是首款采用英特尔架构的Arduino兼容开发板系列的产品,针对创作者与教育界用户打造。此平台可让入门的设计者、还有希望能将其设计推升到更高层次的使用者更进一步上手。
Intel Galileo结合了英特尔技术的效能,以及Arduino软件开发环境的简易性。此款开发板能执行开放原始码的Linux操作系统以及Arduino软件函式库,让用户能轻易扩充,并重复使用现有名为「sketch」的脚本程序代码。英特尔Galileo能在Mac OS、Windows及Linux等操作系统中编写程序。此外,这款开发板亦设计用来和Arduino机板(shield)产业体系维持硬件与软件的兼容性。
Intel Galileo采用了英特尔新发表的Quark SoC X1000,该处理器为Quark技术系列低功耗、小核心产品的首款成员。Quark SoC X1000是32位、单核心/单线程、Pentium指令集架构(ISA)兼容的处理器,运作频率最高达400MHz。
为协助将原生应用与功能扩展至Arduino机板产业体系以外的范畴,英特尔开发板还配备了多种运算产业的标准I/O接口,其中包括ACPI、PCI Express、10/100Mb以太网络、SD记忆卡、USB 2.0装置、以及EHCI/OHCI USB主控端连结埠、高速UART、RS-232串行端口、可编程8MB NOR闪存、以及用来进行除错的JTAG埠。另外,Intel Galileo提供Arduino IDE开发环境众多软件开发资源,将完整且未经修改的Linux软件堆栈的先进功能整合到单一平台,加上共享开放原始码工具链提供强大的支持。
视频介绍 Intel Galileo 的应用
它的具体参数是什么呢?
Intel的介绍:
http://www.intel.com/content/www/us/en/do-it-yourself/galileo-maker-quark-board.html
Arduino上的介绍原文如下:
查看原始链接请点击:http://arduino.cc/en/ArduinoCertified/IntelGalileo
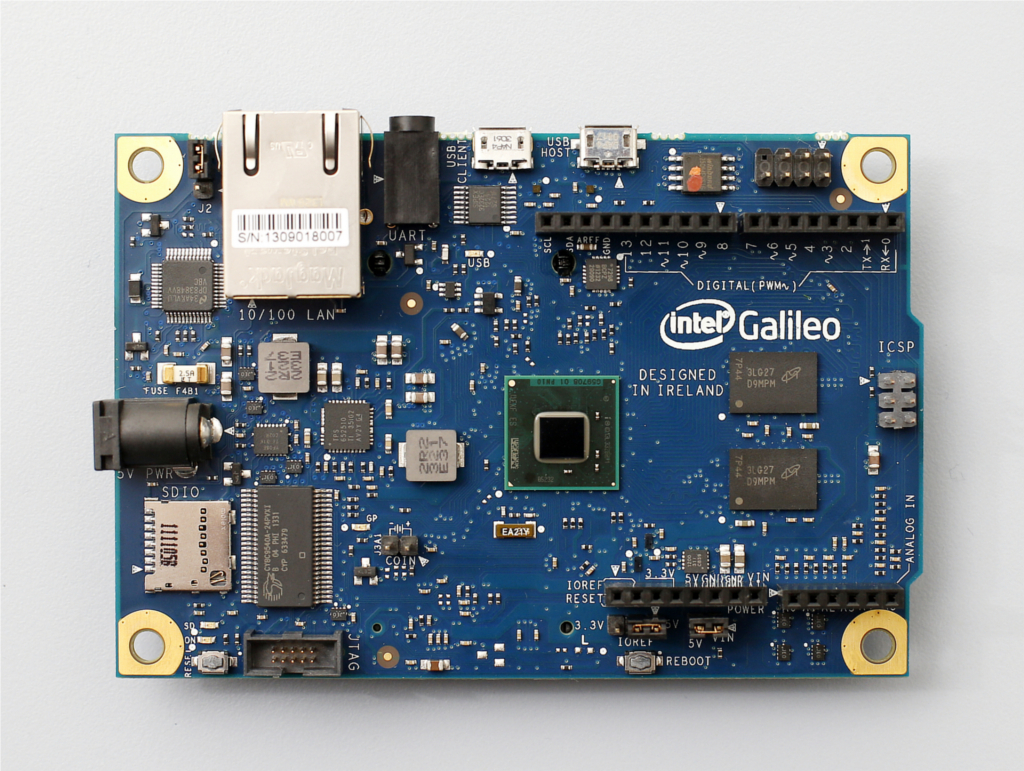
Intel Galileo
Intel Galileo Front Intel Galileo Back Overview
Galileo is a microcontroller board based on the Intel® Quark SoC X1000 Application Processor, a 32-bit Intel Pentium-class system on a chip (datasheet?). It’s the first board based on Intel® architecture designed to be hardware and software pin-compatible with Arduino shields designed for the Uno R3. Digital pins 0 to 13 (and the adjacent AREF and GND pins), Analog inputs 0 to 5, the power header, ICSP header, and the UART port pins (0 and 1), are all in the same locations as on the Arduino Uno R3. This is also known as the Arduino 1.0 pinout.
Galileo is designed to support shields that operate at either 3.3V or 5V. The core operating voltage of Galileo is 3.3V. However, a jumper on the board enables voltage translation to 5V at the I/O pins. This provides support for 5V Uno shields and is the default behavior. By switching the jumper position, the voltage translation can be disabled to provide 3.3V operation at the I/O pins.
Of course, the Galileo board is also software compatible with the Arduino Software Development Environment (IDE), which makes usability and introduction a snap. In addition to Arduino hardware and software compatibility, the Galileo board has several PC industry standard I/O ports and features to expand native usage and capabilities beyond the Arduino shield ecosystem. A full sized mini-PCI Express slot, 100Mb Ethernet port, Micro-SD slot, RS-232 serial port, USB Host port, USB Client port, and 8MByte NOR flash come standard on the board.
Visit the FAQ page for further informations.
最近想给我很老的电脑升级个CPU,打算只花50元左右找个二手的装上,于是研究了这个价位的几款CPU,且想弄清楚它们的性能。(是不是很闲啊,这么烂的CPU还要找个性能看看,其实都很烂的,没必要啦。)最后买下了一款标价60的 E6300 CPU,淘宝网链接:http://item.taobao.com/item.htm?id=22427015214
这些CPU用起来肯定都类似,但是有个性能很重要——超频能力。

在这之前简单谈谈超频
对于CPU的主频,用公式可以计算,即 主频=倍频×外频。 CPU 一般在出场的时候都已经锁住了倍频的,所以无法更改倍频的,只能更改外频,即通常的超频,默认外频一般为100MHz,调节范围从100MHz至600MHz。超频可以采用对CPU加电压的方法,另外,一般的主板现在都支持步进调节来超频。
关于超频,在外频固定的前提下,提升倍频也可以提升CPU的主频。默认倍频通过主频除以默认外频计算出来,最简单的办法是实用cpuz软件来检测。
CPU超频,可以通过不同的倍频外频组合得到最佳稳定运行的主频频率。超频还要根据自己的内存等硬件来综合考量。
要查看超频的技术细节,可以看这个文章:http://tech.sina.com.cn/h/2011-11-21/07101939012.shtml
顺便说说超频原理:
CPU倍频,全称CPU倍频系数。CPU的核心工作频率与外频之间存在着一个比值关系,这个比值就是倍频系数,简称倍频。理论上倍频是从1.5一直到无限的,但需要注意的是,倍频是以0.5为一个间隔单位。外频与倍频相乘就是主频,所以其中任何一项提高都可以使CPU的主频上升。现在CPU的倍频很多已经被锁定,无法修改。
外频又能理解为前端总线(FSB)。那么上面的公式也可以写成 主频=倍频×FSB。但是本质上,PSB和外频是不同的东西。
前端总线”这个名称是由AMD在推出K7 CPU时提出的概念,但是一直以来都被大家误认为这个名词不过是外频的另一个名称。我们所说的外频指的是CPU与主板连接的速度,这个概念是建立在数字脉冲信号震荡速度基础之上的,而前端总线的速度指的是数据传输的速度,由于数据传输最大带宽取决于所有同时传输的数据的宽度和传输频率,即数据带宽=(总线频率×数据位宽)÷8。目前PC机上所能达到的前端总线频率有266MHz、333MHz、400MHz、533MHz、800MHz、1066MHz、 1333MHz几种,前端总线频率越大,代表着CPU与内存之间的数据传输量越大 CPU的功能越强大。
在超频的时候将要处理CPU真正的FSB速度,而不是有效CPU速度。
速度等式的倍频部分也就是一个数字,乘上FSB速度就给出了处理器的总速度。例如,如果有一颗具有200MHz FSB(在乘二或乘四之前的真正FSB速度)和10倍频的CPU,那么等式变成:
(FSB)200MHz×(倍频)10 = 2000MHz CPU速度,或是2.0GHz。
这是超频的基础,也是最简单的计算方法。想要深入了解的话,要知道这是一门学问,需要认真研究才行。
言归正传。虽说就买个几十块钱的二手CPU根本没必要排名了,但终归还是研究了一把。现在把一个网站上找到的东西贴到下面,让我对这些CPU的排名有个大致了解吧。
下文转载自百度文库:http://wenku.baidu.com/view/7076253ff111f18583d05ad2.html
英特尔全系列台式电脑处理器(intel CPU)性能排行榜
英特尔台式电脑处理器(intel CPU)性能排行榜。
以下是包括AMD处理器在内的排名,没有列出的为AMD排名
台式电脑处理器(CPU)性能排行榜
本排行榜随新款处理器(CPU)的发布而随时更新。更新日期:2010年7月14日
排名 厂商 型号
1 Intel Core i7 X 980 @ 3.33GHz
2 Intel Xeon X5670 @ 2.93GHz
3 Intel Xeon X5680 @ 3.33GHz
4 Intel Xeon W3680 @ 3.33GHz
5 Intel Xeon X5660 @ 2.80GHz
6 Intel Xeon X5650 @ 2.67GHz
7 Intel Core i7 975 @ 3.33GHz
8 Intel Xeon W5590 @ 3.33GHz
9 Intel Xeon W3570 @ 3.20GHz
10 Intel Core i7 965 @ 3.20GHz